Product Categories
Manufacturer Listing
Energy
Automotive
More Applications
Comtech News
Supplier News
Company Overview
Company Awards
Join Us
Contacts Us
Product Categories>
Manufacturer Listing>
Energy>
Automotive>
More Applications>
Comtech News>
Supplier News>
Company Overview>
Company Awards>
Join Us>
Contacts Us>
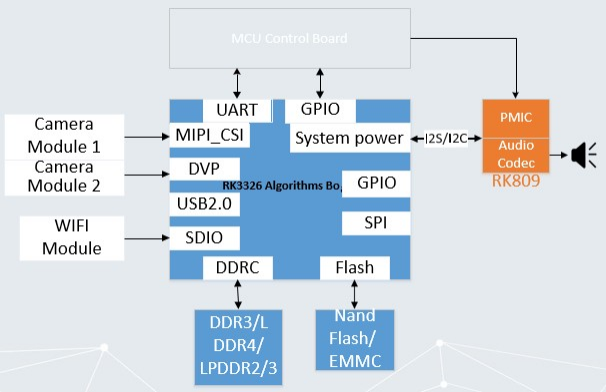
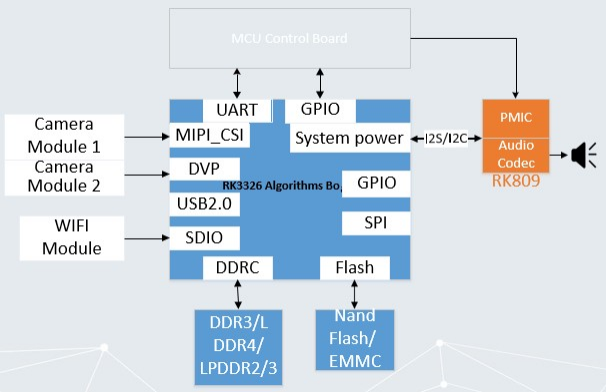
扫地机除了吸尘这一传统的清洁功能以外,特点在于智能,即能够实现自主清扫,移动导航是实现真正全自主移动机器人的关键,体现在定位和地图构建上及路径规划的精准度上。
早期扫地机器人采用随机清扫路径,通过陀螺仪对物品进行定位,经常出现反复清扫或大面积漏扫的情况,清扫效率较低。2019年开始,随着导航系统和路径规划等技术的不断创新,扫地机器人的智能化程度和清洁效果得到了显著的提升。
前规划式产品主要引入SLAM 算法(即时定位与地图构建或并发建图与定位),根据传感器不同,可主要分为激光导航类(以激光雷达为传导器)和视觉导航类(以摄像头为传导器)。激光和视觉导航已成为主流配置,线上市场中单配置的激光类/视觉类扫地机器人零售额份额分别达到44.8%和15.7%。
深圳市科通技术股份有限公司 consumer hotline:(+86)755-26018083 mail:cs@comtech.cn
隐私政策 | © Copyright 2018 www.comtech.cn | 粤ICP备19161615号 |